
Gantry စက်ရုပ်တွင် ကော်လံဘောင်၊ X-ဝင်ရိုး အစိတ်အပိုင်း၊ Y-ဝင်ရိုး အစိတ်အပိုင်း၊ Z-ဝင်ရိုး အစိတ်အပိုင်း၊ တပ်ဆင်မှု နှင့် ထိန်းချုပ်မှုသေတ္တာတို့ ပါဝင်သည်။
၎င်းသည် စတုဂံ X, Y, Z သုံးဖက်မြင် သြဒီနိတ်စနစ်ပေါ်တွင် အခြေခံ၍ အပြည့်အဝ အလိုအလျောက်စက်မှုလုပ်ငန်းသုံး စက်ကိရိယာဖြစ်ပြီး၊ ၎င်းသည် အလုပ်ခွင်အနေအထားကို ချိန်ညှိနိုင်သည် သို့မဟုတ် အလုပ်အပိုင်း၏ လမ်းကြောင်းရွေ့လျားမှုကို သိရှိနိုင်သည်။ ၎င်း၏ထိန်းချုပ်မှု Core ကိုစက်မှုထိန်းချုပ်ကိရိယာများမှတဆင့်အကောင်အထည်ဖော်သည်။
ထိန်းချုပ်သူသည် အမျိုးမျိုးသော input အချက်ပြမှုများကို ပိုင်းခြားစိတ်ဖြာပြီး စီမံဆောင်ရွက်ကာ ကျိုးကြောင်းဆီလျော်သော စီရင်ဆုံးဖြတ်မှုများ ပြုလုပ်ပြီးနောက် X၊ Y နှင့် Z axes အကြား ပူးတွဲရွေ့လျားမှုကို ပြီးမြောက်စေရန်နှင့် အပြည့်အ၀ အလိုအလျောက် လည်ပတ်မှု လုပ်ငန်းစဉ်များကို ပြီးပြည့်စုံသော အစုအဝေးကို နားလည်သဘောပေါက်ရန် အထွက်အစိတ်အပိုင်းတစ်ခုစီသို့ execution commands များကို ထုတ်ပေးပါသည်။
၎င်းကို ကုန်ပစ္စည်း တပ်ဆင်ခြင်းနှင့် သယ်ယူပို့ဆောင်ရေး၊ သယ်ယူပို့ဆောင်ရေးစနစ်များနှင့် မောင်းသူမဲ့ အလုပ်နေရာများတွင် အသုံးပြုသည်။ ယာယီသိုလှောင်မှုနှင့် ထောက်ပံ့ပို့ဆောင်ရေးတို့အတွက် အရေးကြီးသော အရံပစ္စည်းများအဖြစ် အသုံးပြုနိုင်ပြီး အသုံးပြုရလွယ်ကူစေရန်အတွက် လက်ခံသူစက်ပစ္စည်းများနှင့် လိုက်လျောညီထွေဖြစ်စေသည်။ ပါဝင်သော Application Industries : နောက်ဆုံးစုဝေးခြင်း၊ စုဝေးခြင်းခွဲ၊ စီမံဆောင်ရွက်ခြင်း၊ စမ်းသပ်ခြင်း၊ အမှားရှာခြင်းနှင့် ကုန်ပစ္စည်းသယ်ယူပို့ဆောင်ခြင်း အစရှိသည်တို့ပါဝင်သည်။
ထုတ်ကုန်၏အင်္ဂါရပ်များသည် ပစ္စည်းအမျိုးအစားအမျိုးမျိုးတွင် ထိရောက်မှုနည်းသော သို့မဟုတ် မြင့်မားသောကိုင်တွယ်မှုအန္တရာယ်ပြဿနာများကို ဖောက်သည်များအား ကူညီဖြေရှင်းပေးရန်ဖြစ်ပြီး ကိုင်တွယ်မှုအန္တရာယ်များကို လွယ်ကူလျင်မြန်စွာ လျှော့ချရန်၊ အချိန်ကုန်၊ အားထုတ်မှု၊ လုပ်အားကို သက်သာစေရန်နှင့် လုပ်အားအစားထိုးပင်ဖြစ်စေရန်။
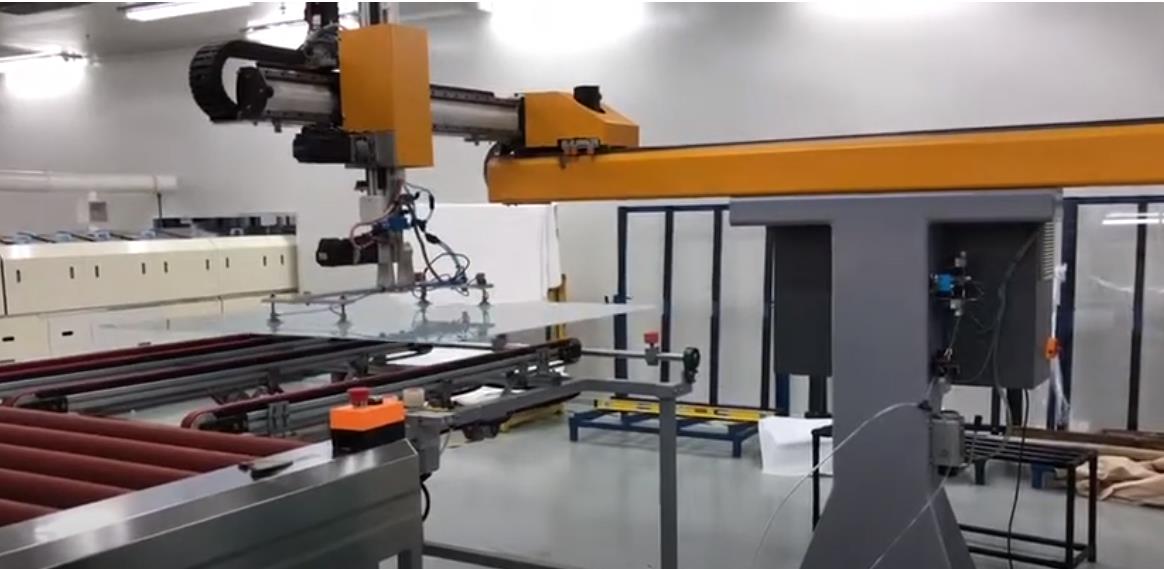
 ဤ gantry truss manipulator ကိုင်တွယ်သည့်ကိရိယာတွင် ကော်လံများနှင့် ကော်လံများတွင် တပ်ဆင်ထားသော ကန့်လန့်ဖြတ်စာတန်းများ ပါဝင်ပါသည်။ လက်ဝါးကပ်တိုင်များကို လျှောသံလမ်းများဖြင့် တပ်ဆင်ထားသည်။ ဆလိုက်သံလမ်းများကို transverse sliding device ဖြင့် တပ်ဆင်ထားပါသည်။ အလျားလိုက်လျှောခြင်းကိရိယာကို ဒေါင်လိုက်လျှောစက်နှင့် လေစုပ်ခွက်စုပ်ကိရိယာဖြင့် တပ်ဆင်ထားသည်။ သဘောပေါက်နိုင်သည် သယ်ယူပို့ဆောင်ရေးယန္တရားသည် သုံးဖက်မြင် အာကာသအတွင်း ပုံသေအမှတ်တစ်ခုသို့ ရွေ့လျားပြီး၊ ဖန်ခွက်ကို စုပ်ယူကာ၊ ပထမဦးစွာ X-axis ပေါ်မှ ဘေးတိုက်ရွှေ့ကာ သတ်မှတ်ထားသော အနေအထားသို့ 90 ဒီဂရီ လှန်ကာ အပေါ်သို့ ရွှေ့ပါ။ Y-ဝင်ရိုးပေါ်တွင် ဆင်းပါ။ သတ်မှတ်အနေအထားရောက်ပြီးနောက် ဖန်ခွက်ကို လွှတ်ပြီး ဖန်စင်ပေါ်တင်ပါ။ စက်တစ်ခုလုံး၏ဖွဲ့စည်းပုံဆိုင်ရာတည်ငြိမ်မှုသည်အလွန်မြင့်မားသည်၊ ၎င်းသည်ကိုင်တွယ်ကိုင်တွယ်မှုကိုအလွန်တိုးတက်စေသည်။ လုပ်ရည်ကိုင်ရည်။
ဤ gantry truss manipulator ကိုင်တွယ်သည့်ကိရိယာတွင် ကော်လံများနှင့် ကော်လံများတွင် တပ်ဆင်ထားသော ကန့်လန့်ဖြတ်စာတန်းများ ပါဝင်ပါသည်။ လက်ဝါးကပ်တိုင်များကို လျှောသံလမ်းများဖြင့် တပ်ဆင်ထားသည်။ ဆလိုက်သံလမ်းများကို transverse sliding device ဖြင့် တပ်ဆင်ထားပါသည်။ အလျားလိုက်လျှောခြင်းကိရိယာကို ဒေါင်လိုက်လျှောစက်နှင့် လေစုပ်ခွက်စုပ်ကိရိယာဖြင့် တပ်ဆင်ထားသည်။ သဘောပေါက်နိုင်သည် သယ်ယူပို့ဆောင်ရေးယန္တရားသည် သုံးဖက်မြင် အာကာသအတွင်း ပုံသေအမှတ်တစ်ခုသို့ ရွေ့လျားပြီး၊ ဖန်ခွက်ကို စုပ်ယူကာ၊ ပထမဦးစွာ X-axis ပေါ်မှ ဘေးတိုက်ရွှေ့ကာ သတ်မှတ်ထားသော အနေအထားသို့ 90 ဒီဂရီ လှန်ကာ အပေါ်သို့ ရွှေ့ပါ။ Y-ဝင်ရိုးပေါ်တွင် ဆင်းပါ။ သတ်မှတ်အနေအထားရောက်ပြီးနောက် ဖန်ခွက်ကို လွှတ်ပြီး ဖန်စင်ပေါ်တင်ပါ။ စက်တစ်ခုလုံး၏ဖွဲ့စည်းပုံဆိုင်ရာတည်ငြိမ်မှုသည်အလွန်မြင့်မားသည်၊ ၎င်းသည်ကိုင်တွယ်ကိုင်တွယ်မှုကိုအလွန်တိုးတက်စေသည်။ လုပ်ရည်ကိုင်ရည်။

စာတိုက်အချိန်- မတ်-၁၈-၂၀၂၄



