
ထုတ်ကုန်များ


လျှပ်စစ်ဂျစ်ကရိန်း စက်ရုပ်လက်မောင်း ခြယ်လှယ်ခြင်း။
အတိုချုံးဖော်ပြချက်-
လျှပ်စစ်ဂျစ်ကရိန်း စက်ရုပ်လက်မောင်းကို ကိုင်တွယ်ထိန်းကျောင်းခြင်းကို cantilever lifting crane ဟုခေါ်သည်၊ ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ လုံခြုံပြီး ယုံကြည်စိတ်ချရသည်။ ကြားကာလ-အလွန်အမင်း သယ်ယူပို့ဆောင်ရေးကိစ္စများအတွက် သင့်လျော်ပါသည်။ ၎င်းသည် အခြားရိုးရာ lifting စက်များထက် အားသာချက်များစွာရှိပါသည်။ Cantilever crane သည် လျှပ်စစ်ဓာတ်လှေကားနှင့် လက်ဆွဲအားသုံး၍ lifting equipment တစ်ခုဖြစ်သည်။ ဓာတ်လှေကားသည် အဆင်ပြေပြီး လူကြိုက်များသည့် အသေးစား lifting ပစ္စည်းတစ်ခုဖြစ်သည်။

လျှပ်စစ်ဂျစ်ကရိန်း စက်ရုပ်လက်မောင်း ခြယ်လှယ်ခြင်းသည် ကော်လံ၊ လွှဲလက်မောင်း၊ လှည့်ပတ်မောင်းနှင်သည့် စက်နှင့် ရုတ်သိမ်းသည့် ကိရိယာများဖြင့် ဖွဲ့စည်းထားသည့် ပေါ့ပါးသော လုပ်ဆောင်နိုင်စွမ်းရှိသော စွမ်းအားဖြင့် ခြယ်လှယ်သည့် စက်ဖြစ်သည်။ ပေါ့ပါးသော အလေးချိန်၊ ကြီးမားသော အတိုင်းအတာ၊ ရွေ့လျားမှု၊ ရွေ့လျားမှု၊ ဘယ်ညာတည့်တည့် ရွေ့လျားမှုအတွက် cantilever ပေါ်ရှိ ပစ္စည်းများ၊ လေးလံသော အရာများကို သယ်ဆောင်ပါ။
လျှပ်စစ်ဂျစ်ကရိန်း စက်ရုပ်လက်မောင်း ခြယ်လှယ်မှုသည် ပစ္စည်းများအား ရုတ်သိမ်းရန် အထောက်အကူဖြစ်ပြီး အော်ပရေတာများအား ချောမွေ့မြန်ဆန်ပြီး တိကျသော ကိုင်တွယ်ခြင်းနှင့် စည်းခြင်းလုပ်ဆောင်ရန် ကူညီပေးခြင်း၊ ထုတ်လုပ်မှု ထိရောက်မှုနှင့် လုပ်သားစရိတ်များကို လျှော့ချရန်အတွက် ကူညီပေးသည်။

ကြှနျုပျတို့အကွောငျး

ကျွန်ုပ်တို့သည် ပရော်ဖက်ရှင်နယ် စိတ်ကြိုက် အလိုအလျောက် စက်ကိရိယာများ ထုတ်လုပ်သူဖြစ်သည်။ ကျွန်ုပ်တို့၏ထုတ်ကုန်များတွင် depalletizer၊ ရွေးပြီးနေရာချထုပ်ပိုးသည့်စက်၊ palletizer၊ စက်ရုပ်ပေါင်းစည်းခြင်းအပလီကေးရှင်း၊ loading and unloading manipulators၊ carton forming၊carton sealing၊pallet dispensper၊ wrapping machine နှင့် back-end packaging production line အတွက် အခြားသော အလိုအလျောက်ဖြေရှင်းနည်းများ ပါဝင်ပါသည်။
ကျွန်ုပ်တို့၏စက်ရုံဧရိယာသည် 3,500 စတုရန်းမီတာခန့်ရှိသည်။ ပင်မနည်းပညာအဖွဲ့တွင် စက်ပိုင်းဆိုင်ရာ ဒီဇိုင်းအင်ဂျင်နီယာ 2 ဦးအပါအဝင် စက်ပိုင်းဆိုင်ရာ အလိုအလျောက်စနစ်တွင် ပျမ်းမျှ 5-10 နှစ်အတွေ့အကြုံရှိသည်။ ပရိုဂရမ်းမင်းအင်ဂျင်နီယာ ၁ ဦး၊ တပ်ဆင်လုပ်သား ၈ ဦး၊ အရောင်းအပြီးတွင် အမှားရှာပြင်သူ ၄ ဦးနှင့် အခြားလုပ်သား ၁၀ ဦး
ကျွန်ုပ်တို့၏နိယာမမှာ "ဖောက်သည် ပထမ၊ အရည်အသွေး ပထမ၊ ဂုဏ်သတင်းဦးဆုံး"၊ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ဖောက်သည်များအား "ထုတ်လုပ်မှုစွမ်းရည်ကို မြှင့်တင်ရန်၊ ကုန်ကျစရိတ်များကို လျှော့ချရန်နှင့် အရည်အသွေးကို မြှင့်တင်ရန်" ကို အမြဲကူညီပေးပါသည်။
cantilever suspension ၏အင်္ဂါရပ်များ
1.လူမီနီယမ်အလွိုင်းအမျိုးအစား လက်တံ သို့မဟုတ် သံမဏိ cantilever ကိုရွေးချယ်ပါ။
2.Modular စည်းဝေးပွဲ၊ အစားထိုးနိုင်သော cantilever အရှည်;
3.Rotary ထောင့် 0-360°;
4. တပ်ဆင်ရလွယ်ကူပြီး မြန်ဆန်သည်။


cantilever suspension ၏ အားသာချက်များ
1. Cantilever သည် ခေတ်မီထုတ်လုပ်ရန်အတွက် အလင်းကြွကိရိယာ မျိုးဆက်သစ်ဖြစ်သည်။ လက်စွပ်လျှပ်စစ်ဘူးသီးကွင်းဆက်၏ မြင့်မားသောယုံကြည်စိတ်ချရမှုဖြင့် အထူးသင့်လျော်ပြီး တိုတောင်းသောအကွာအဝေး၊ မကြာခဏအသုံးပြုမှုနှင့် အရှိန်အဟုန်ပြင်းစွာ ရုတ်သိမ်းခြင်းလုပ်ငန်းဆောင်တာများအတွက် အထူးသင့်လျော်ပြီး ၎င်းသည် မြင့်မားသောထိရောက်မှု၊ စွမ်းအင်ချွေတာမှု၊ ပြဿနာသက်သာစေမှု၊ သေးငယ်သောဧရိယာ၊ လွယ်ကူသောလည်ပတ်မှုနှင့် ထိန်းသိမ်းမှုတို့ဖြစ်သည်။
2. Cantilever သည် ပိုမိုပြောင်းလွယ်ပြင်လွယ်ရှိပြီး ကျယ်ပြန့်စွာ လိုက်လျောညီထွေရှိကာ ထိရောက်ပြီး အလိုအလျောက် ထုတ်လုပ်မှုလိုင်းတွင် လိုအပ်သော သီးခြား အရေးပေါ် lifting ကိရိယာတစ်ခုဖြစ်ပြီး ထုတ်လုပ်မှုလိုင်း၏ ချောမွေ့စွာစီးဆင်းမှုကို သေချာစေသည်။
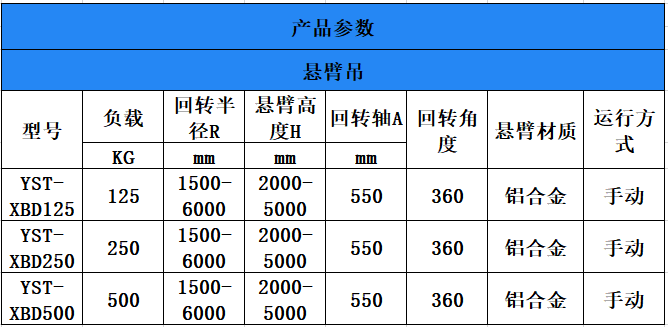
| မော်ဒယ် | ဝန် | R/mm | H/mm | A/mm | အလှည့် | ပစ္စည်း | အလုပ်လုပ်တယ်။ |
| YST-XBD125 | ၁၂၅ | ၁၅၀၀-၊၆၀၀၀ | ၂၀၀၀-၅၀၀၀ | ၅၅၀ | ၃၆၀ | အလူမီနီယမ်အလွိုင်း | လက် |
| YST-XBD250 | ၂၅၀ | ၁၅၀၀-၊၆၀၀၀ | ၂၀၀၀-၅၀၀၀ | ၅၅၀ | ၃၆၀ | အလူမီနီယမ်အလွိုင်း | လက် |
| YST-XBD500 | ၅၀၀ | ၁၅၀၀-၊၆၀၀၀ | ၂၀၀၀-၅၀၀၀ | ၅၅၀ | ၃၆၀ | အလူမီနီယမ်အလွိုင်း | လက် |
ကုန်ပစ္စည်းအကြောင်းအရာ
Collaborative Robots များသည် မျှဝေထားသော၊ ပူးပေါင်းလုပ်ဆောင်သည့်နေရာတစ်ခုတွင် လူသားလုပ်သားများနှင့်အတူ ဘေးကင်းစွာ အလုပ်လုပ်နိုင်ရန် ဖန်တီးထားသော စက်ရုပ်အလိုအလျောက်စနစ်ပုံစံတစ်ခုဖြစ်သည်။ အပလီကေးရှင်းအများစုတွင်၊ လူသားလုပ်သားတစ်ဦးသည် ပိုမိုရှုပ်ထွေးပြီး တွေးခေါ်မှုအားကောင်းသော အလုပ်များကို ပြီးမြောက်ချိန်တွင် ထပ်ခါတလဲလဲ လုပ်ဆောင်နိုင်သော အလုပ်များကို ပေါင်းစပ်လုပ်ဆောင်သော စက်ရုပ်တစ်ခုတွင် တာဝန်ရှိပါသည်။ ပူးပေါင်းလုပ်ဆောင်သော စက်ရုပ်များ၏ တိကျမှု၊ အလုပ်ချိန်နှင့် ထပ်တလဲလဲလုပ်ဆောင်နိုင်မှုသည် လူသားလုပ်သားတစ်ဦး၏ ဉာဏ်ရည်ဉာဏ်သွေးနှင့် ပြဿနာဖြေရှင်းနိုင်မှုစွမ်းရည်ကို ဖြည့်တင်းရန် ဒီဇိုင်းထုတ်ထားသည်။
ပူးပေါင်းလုပ်ဆောင်သော စက်ရုပ်ဒီဇိုင်းများသည် ၎င်းတို့၏စက်ရုပ်စက်ရုပ်များနှင့် အလွန်ကွာခြားပါသည်။ လုံးဝန်းသောအနားသတ်များ၊ အင်အားကန့်သတ်ချက်များနှင့် ပေါ့ပါးသောအလေးများပါရှိသော ပူးပေါင်းလုပ်ဆောင်သည့်စက်ရုပ်များသည် ဘေးကင်းစေရန်အတွက် ပထမဆုံးနှင့် အဦးဆုံးဒီဇိုင်းထုတ်ထားပါသည်။ ပူးပေါင်းလုပ်ဆောင်သည့် စက်ရုပ်အများစုတွင် လူသားလုပ်သားများနှင့် မတိုက်မိစေရန် အာရုံခံကိရိယာများ တပ်ဆင်ထားပြီး မစီစဉ်ထားဘဲ ထိတွေ့မှုပုံစံတစ်ခုခု ဖြစ်ပေါ်ပါက ပိတ်ပစ်ရန် ဘေးကင်းလုံခြုံရေး ပရိုတိုကောများ တပ်ဆင်ထားသည်။
ထုတ်ကုန်အင်္ဂါရပ်များ
1.လူမီနီယမ်အလွိုင်းအမျိုးအစား လက်တံ သို့မဟုတ် သံမဏိ cantilever ကိုရွေးချယ်ပါ။
2.Modular စည်းဝေးပွဲ၊ အစားထိုးနိုင်သော cantilever အရှည်;
3.Rotary ထောင့် 0-360°;
4. တပ်ဆင်ရလွယ်ကူပြီး မြန်ဆန်သည်။









