ထုတ်ကုန်များ


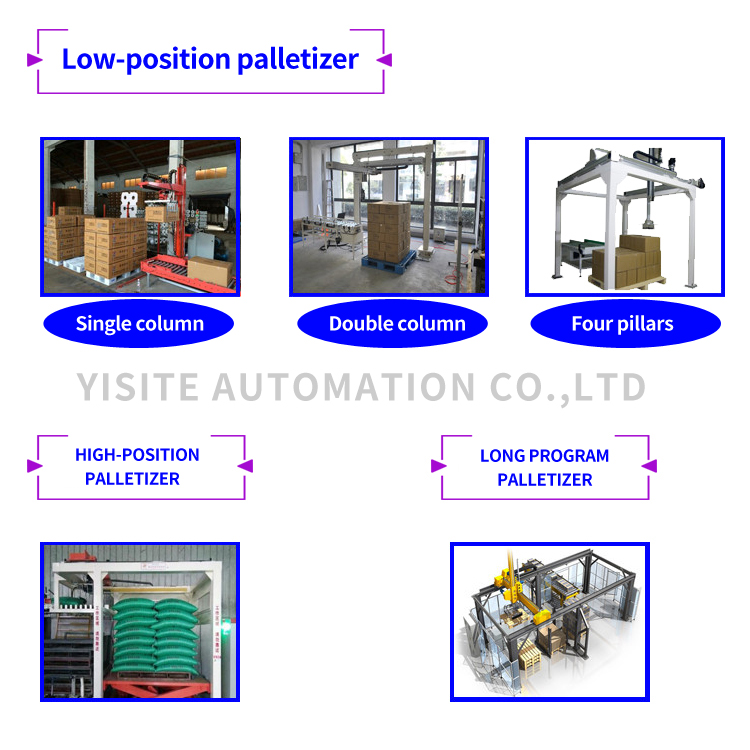
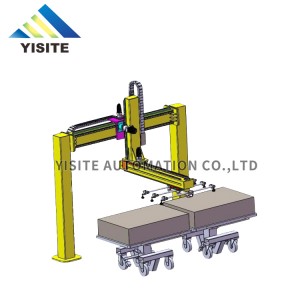
ကော်လံတစ်ခုတည်း ထောက်လှမ်းရေး 3 ဝင်ရိုး servo အလိုအလျောက် ထုပ်ပိုးခြင်း ထုပ်ပိုးခြင်း ခြယ်လှယ်မှု
အတိုချုံးဖော်ပြချက်-
ကော်လံတစ်ခုတည်းအတွက် ထုပ်ပိုးခြင်းဆိုင်ရာ ကိုင်တွယ်ခြယ်လှယ်မှုတွင် ကော်လံတစ်ခုနှင့် ကော်လံပေါ်တွင် တပ်ဆင်ထားသော အလျားလိုက်ခေါက်လက်တံများ ပါဝင်သည်။ ကော်လံကို rotary base တွင် တပ်ဆင်ထားသည်။ အလျားလိုက် လက်ကို လွတ်လွတ်လပ်လပ် ခေါက်နိုင်ပြီး နောက်ပြန်ဆွဲနိုင်ပြီး ကော်လံတစ်လျှောက် အပေါ်အောက် ရွှေ့နိုင်သည်။ ဤစက်ရုပ်အမျိုးအစားတွင် လှည့်ပတ်သော axes သုံးခုနှင့် အပေါ်အောက် lifting ဝင်ရိုးတစ်ခုရှိသည်။
ကတ်တွန်အတွက် ကော်လံတစ်ခုတည်း ထုပ်ပိုးခြင်း ထုပ်ပိုးခြင်း ခြယ်လှယ်မှုတွင် တပ်ဆင်မှု အခြေခံ၊ ပထမဆုံး လျှောပစ်ကိရိယာ၊ ဒေါင်လိုက် လမ်းညွှန်သံလမ်းများ၊ ဒေါင်လိုက်လျှောယန္တရား၊ လက်မောင်း ဆာဗိုဒရိုက်ယူနစ်၊ အဆုံး ဆာဗိုဒရိုက်ယူနစ် စသည်ဖြင့် ပါဝင်သည်။ ပစ္စည်းကို ပစ်မှတ်အနေအထားတွင် တိကျမှန်ကန်စွာ ထားရှိခြင်းဖြင့် လူသားကုန်ကျစရိတ်ကို သက်သာစေပါသည်။
ကတ်တွန်အတွက် ကော်လံတစ်ခုတည်း ထုပ်ပိုးခြင်း ထုပ်ပိုးခြင်း ခြယ်လှယ်ခြင်း သည် သေးငယ်သော နေရာယူသည်၊ အလွန်ချွေတာပြီး လက်တွေ့ကျသည်၊ တပ်ဆင်ရန်နှင့် ရွှေ့ရန် လွယ်ကူသည်၊ စျေးကွက်နှင့် ပိုမိုလိုက်လျောညီထွေရှိသည်။


ကြှနျုပျတို့အကွောငျး

ကျွန်ုပ်တို့သည် ပရော်ဖက်ရှင်နယ် စိတ်ကြိုက် အလိုအလျောက် စက်ကိရိယာများ ထုတ်လုပ်သူဖြစ်သည်။ ကျွန်ုပ်တို့၏ထုတ်ကုန်များတွင် depalletizer၊ ရွေးပြီးနေရာချထုပ်ပိုးသည့်စက်၊ palletizer၊ စက်ရုပ်ပေါင်းစည်းခြင်းအပလီကေးရှင်း၊ loading and unloading manipulators၊ carton forming၊carton sealing၊pallet dispensper၊ wrapping machine နှင့် back-end packaging production line အတွက် အခြားသော အလိုအလျောက်ဖြေရှင်းနည်းများ ပါဝင်ပါသည်။
ကျွန်ုပ်တို့၏စက်ရုံဧရိယာသည် 3,500 စတုရန်းမီတာခန့်ရှိသည်။ ပင်မနည်းပညာအဖွဲ့တွင် စက်ပိုင်းဆိုင်ရာ ဒီဇိုင်းအင်ဂျင်နီယာ 2 ဦးအပါအဝင် စက်ပိုင်းဆိုင်ရာ အလိုအလျောက်စနစ်တွင် ပျမ်းမျှ 5-10 နှစ်အတွေ့အကြုံရှိသည်။ ပရိုဂရမ်းမင်းအင်ဂျင်နီယာ ၁ ဦး၊ တပ်ဆင်လုပ်သား ၈ ဦး၊ အရောင်းအပြီးတွင် အမှားရှာပြင်သူ ၄ ဦးနှင့် အခြားလုပ်သား ၁၀ ဦး
ကျွန်ုပ်တို့၏နိယာမမှာ "ဖောက်သည် ပထမ၊ အရည်အသွေး ပထမ၊ ဂုဏ်သတင်းဦးဆုံး"၊ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ဖောက်သည်များအား "ထုတ်လုပ်မှုစွမ်းရည်ကို မြှင့်တင်ရန်၊ ကုန်ကျစရိတ်များကို လျှော့ချရန်နှင့် အရည်အသွေးကို မြှင့်တင်ရန်" ကို အမြဲကူညီပေးပါသည်။
Carton stacking manipulator လက္ခဏာများ
1. အဆင်ပြေသောထိန်းချုပ်မှု- PLC + မျက်နှာပြင်ထိန်းချုပ်မှု၊ လည်ပတ်မှုကိုအလွန်လွယ်ကူချောမွေ့စေသည်၊ စီမံခန့်ခွဲမှု၊ ထုတ်လုပ်မှု ၀ န်ထမ်းများနှင့်အလုပ်သမားပြင်းထန်မှုကိုလျှော့ချသည်၊ အလိုအလျောက်စကေးထုတ်လုပ်မှုအတွက်မရှိမဖြစ်လိုအပ်သောကိရိယာတစ်ခုဖြစ်သည်။
2. အဆင်ပြေသောလည်ပတ်မှု- ထုပ်ပိုးမှုကုန်ကျစရိတ်ကို လျှော့ချပါ၊ အထူးသဖြင့် နေရာကျဉ်းကျဉ်းလေးနှင့် အထွက်နည်းသော လုပ်ငန်းများအတွက် အထူးသင့်လျော်ပါသည်။
3. ယာဉ်မောင်းမဟုတ်သော လုပ်ဆောင်ချက်- အထူးသဖြင့် အလိုအလျောက် ထုပ်ပိုးခြင်း၊ ထုပ်ပိုးခြင်းနှင့် တံဆိပ်ခတ်ခြင်း ကဲ့သို့သော ရှေ့ဆုံးမှ ရှေ့နှင့်နောက် ထုပ်ပိုးခြင်း စက်နှင့်၊ အလိုအလျောက် မောင်းသူမဲ့ ထုပ်ပိုးမှုနှင့် သိုလှောင်မှုတို့ကို သိရှိနားလည်ရန် အလိုအလျောက် အစုလိုက် ထောက်ပံ့ရေးစက်၊ ဓားထုပ်ပိုး၊ ထုပ်ပိုးစက်နှင့် အခြားထုပ်ပိုးသည့် စက်ကိရိယာများဖြင့် နောက်ဖက်တွင်၊ အလိုအလျောက် မောင်းသူမဲ့ ထုပ်ပိုးမှုနှင့် သိုလှောင်မှု။ ထောင့်မှန် အမျိုးအစား၊ ခိုင်မာသော ဖွဲ့စည်းပုံ၊ ပိုလေးသော ကုန်ပစ္စည်းများအတွက် သင့်လျော်သည်။
ဝင်ရိုးသုံးရပ်ဆာဗာကို ကွက်လပ်ပြုလုပ်ခြယ်လှယ်ခြင်း ဖော်ပြချက်
ထုပ်ပိုးထားသောပုံးများကို သတ်မှတ်ထားသော palletizing ဧရိယာသို့ ပို့ဆောင်ခြင်းဖြင့် နေရာချထားသည်၊ servo stacker သည် တိုးချဲ့ထားသော လက်မောင်းနှင့် suction cups များကို ပုံးပုံတင်နေရာအပေါ်တွင် တိုက်ရိုက်နေရာချသည်၊၊ carton positioning signal ကိုထုတ်ပေးသောအခါ၊ cantilever ကို servo အားဖြင့် downward (Z axial motion) ကိုထိန်းချုပ်ထားသည်။ မော်တာ၊ စုပ်ယူနိုင်သော အမြင့်သို့ရောက်သောအခါ၊ cantilever ပြုတ်ကျခြင်း၊ ဖုန်စုပ်စုပ်စက်ဖွင့်ခြင်း၊ ပုံးကိုစုပ်ပြီးနောက်၊ Coverlever Seromotor ပြောင်းပြန်လှန်ခြင်း၊ cantilever ကို ဘေးကင်းသောအမြင့်သို့ ရုတ်သိမ်းပြီးနောက်၊ cantilever ၏ရွေ့လျားမှုကို ဘယ်ညာ servo motor မှတဆင့်၊ cantilever ရွေ့လျားမှုကို အလိုရှိသော အနေအထား (X-axis ရွေ့လျားမှု)၊ (Z-axis ရွေ့လျားမှု) အထက်တွင် နေရာချထားပြီးနောက်၊ cantilever သည် အောက်ဘက်သို့ တက်လာပြီး ဆာဗာမော်တာ စတင်ရွေ့လျားပြီး၊ သတ်မှတ် အနေအထားသို့ ရွှေ့ပါ (စုပ်စက်ကို ဖြည်လိုက်သည်၊ အမြင့်ကို အလိုအလျောက် ရှာဖွေရန်၊ ပုံးပုံး)) ကတ်တွန်ကို သတ်မှတ်ထားသော တည်နေရာသို့ ကုဒ်လုပ်ပါ။ ပြားချပ်ခြင်းတစ်ခုလုံး အပြီးတွင် ထပ်လုပ်ပါ၊ ကန့်လန့်ဖြတ်ခြင်း ပြီးသွားကြောင်း သတိပေးရန်၊ အလွှာလိုက်ပြုလုပ်ခြင်း ပြီးသွားကြောင်း သတိပေးရန်အတွက် အထက်ဖော်ပြပါ လုပ်ဆောင်ချက်ကို ပြန်လုပ်ပါ။ ၎င်းကို အပြန်အလှန်ပေးပါသည်။( cantilever ပေါ်ရှိ suction cup သည် servo motor မှတဆင့် Y-axis ကို ရွှေ့နိုင်ပြီး သတ်မှတ်ထားသော အနေအထားသို့ ရွှေ့နိုင်ပြီး 3-axis ကို တချိန်တည်း ရွှေ့နိုင်သည်။)


ထုတ်ကုန်နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
1) စက်အရွယ်အစား: L2400*W2200* H2800mm
2) Clamp: လက်ကိုင်ပဝါ
3) stacking အမျိုးအစား: ဖောက်သည်များလိုအပ်ချက်အရ
3) မြန်နှုန်း: 6-7 ပုံး / တစ်မိနစ်
4) အလေးချိန် 700Kg
5) ဗို့အား: 380V 50/60Hz
6) လေအရင်းအမြစ်: 0.6-0.8mpa
7) ပစ္စည်း- ကာဗွန်သံမဏိ၊ ပလပ်စတစ်မှုတ်ဆေး
8) PLC: မစ်ဆူဘီရှီ
9) ဆာဗာ: မစ်ဆူဘီရှီ
10) Pneumatic ဒြပ်စင်များ: SMC
11) ဓာတ်ပုံလျှပ်စစ်အစိတ်အပိုင်းများ- Omron
12) ကတ်အရွယ်အစား: L200-600*W150-500*H150-500mm