
ထုတ်ကုန်များ

ကတ်တွန်သေတ္တာ gantry အော်တို palletizer
အတိုချုံးဖော်ပြချက်-
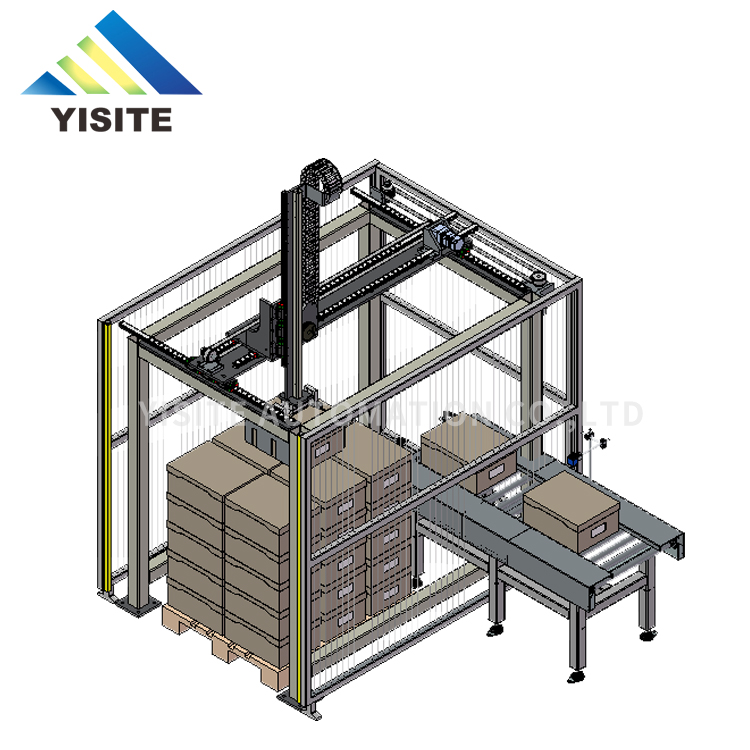
carton box gantry auto palletizer ထုတ်ကုန်မိတ်ဆက်ခြင်း- palletizer ၏အဓိကယူနစ်သည် ရှေ့နှင့်နောက်သို့သွားနိုင်သောတွန်းလှည်း၊ ဖရိန်တစ်ခုနှင့် အတက်အဆင်းပြုလုပ်နိုင်သော carrier platform တစ်ခုဖြင့်ဖွဲ့စည်းထားသည်။ အရွယ်အစားနှင့် ပြင်ဆင်မှုတို့ကို စိတ်ကြိုက်ပြုလုပ်နိုင်ပါသည်။
carton box gantry auto palletizer သည် pneumatic grip၊ ချိန်ညှိနိုင်သောဖိအား၊ pressure buffer valve ပါရှိသော အထူးဒီဇိုင်းဖြင့် တပ်ဆင်ထားသောကြောင့် induction ယန္တရားတပ်ဆင်ထားသော ဆုပ်ကိုင်လုပ်ဆောင်ချက်သည် အရာဝတ္တုကို အလိုအလျောက် သိရှိနိုင်ပြီး အရာဝတ္ထုကို ဆုပ်ကိုင်ရန်အတွက် ထိန်းချုပ်ရေးစင်တာသို့ အကြောင်းကြားရန်။

ကြှနျုပျတို့အကွောငျး

ကျွန်ုပ်တို့သည် ပရော်ဖက်ရှင်နယ် စိတ်ကြိုက် အလိုအလျောက် စက်ကိရိယာများ ထုတ်လုပ်သူဖြစ်သည်။ ကျွန်ုပ်တို့၏ထုတ်ကုန်များတွင် depalletizer၊ ရွေးပြီးနေရာချထုပ်ပိုးသည့်စက်၊ palletizer၊ စက်ရုပ်ပေါင်းစည်းခြင်းအပလီကေးရှင်း၊ loading and unloading manipulators၊ carton forming၊carton sealing၊pallet dispensper၊ wrapping machine နှင့် back-end packaging production line အတွက် အခြားသော အလိုအလျောက်ဖြေရှင်းနည်းများ ပါဝင်ပါသည်။
ကျွန်ုပ်တို့၏စက်ရုံဧရိယာသည် 3,500 စတုရန်းမီတာခန့်ရှိသည်။ ပင်မနည်းပညာအဖွဲ့တွင် စက်ပိုင်းဆိုင်ရာ ဒီဇိုင်းအင်ဂျင်နီယာ 2 ဦးအပါအဝင် စက်ပိုင်းဆိုင်ရာ အလိုအလျောက်စနစ်တွင် ပျမ်းမျှ 5-10 နှစ်အတွေ့အကြုံရှိသည်။ ပရိုဂရမ်းမင်းအင်ဂျင်နီယာ ၁ ဦး၊ တပ်ဆင်လုပ်သား ၈ ဦး၊ အရောင်းအပြီးတွင် အမှားရှာပြင်သူ ၄ ဦးနှင့် အခြားလုပ်သား ၁၀ ဦး
ကျွန်ုပ်တို့၏နိယာမမှာ "ဖောက်သည် ပထမ၊ အရည်အသွေး ပထမ၊ ဂုဏ်သတင်းဦးဆုံး"၊ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ဖောက်သည်များအား "ထုတ်လုပ်မှုစွမ်းရည်ကို မြှင့်တင်ရန်၊ ကုန်ကျစရိတ်များကို လျှော့ချရန်နှင့် အရည်အသွေးကို မြှင့်တင်ရန်" ကို အမြဲကူညီပေးပါသည်။
Truss XYZ အပြည့်အဝအလိုအလျောက်ပုံးပုံး bos stacking manipulator
1. stacker စက်၏ဖွဲ့စည်းမှု
Palletizing စက်သည် တပ်ဆင်ဘောင်၊ နေရာချထားမှုစနစ်၊ ဆာဗိုဒရိုက်စနစ်၊ ထိန်းချုပ်မှုစနစ်၊ လျှပ်စစ်ထိန်းချုပ်မှုနှင့် ဖြန့်ဖြူးမှုစနစ်၊ ဘေးကင်းရေး အကာအကွယ်ကိရိယာ၊ စသည်တို့ဖြင့် ဖွဲ့စည်းထားပြီး၊ အလိုအလျောက် အစာစားသည့်နေရာချထားမှုစနစ်ဖြင့် တပ်ဆင်ထားသည်။(ရွေးချယ်နိုင်သော အလိုအလျောက် အစုလိုက်ထောက်ပံ့မှုစနစ်)
2. Stacking machine mounting rack
stacker ၏ရွေ့လျားမှုအမြန်နှုန်းသည်အလွန်မြန်သောကြောင့်၊ စတင်သည့်အခြေအနေသည် mounting frame ပေါ်တွင်ကြီးမားသောအကျိုးသက်ရောက်မှုရှိသည်။ တပ်ဆင်မှုဘောင်သည် stacking ၏တည်ငြိမ်သောလည်ပတ်မှုကိုသေချာစေရန်အလွန်ကောင်းမွန်ရမည်ဖြစ်ပြီး၊ ထို့ကြောင့်ကျွန်ုပ်တို့သည်ဂဟေဆော်ထားသောစတီးဖရိမ်ကိုဒီဇိုင်းဆွဲထားသည်။ အထောက်အပံ့ဘောင်။
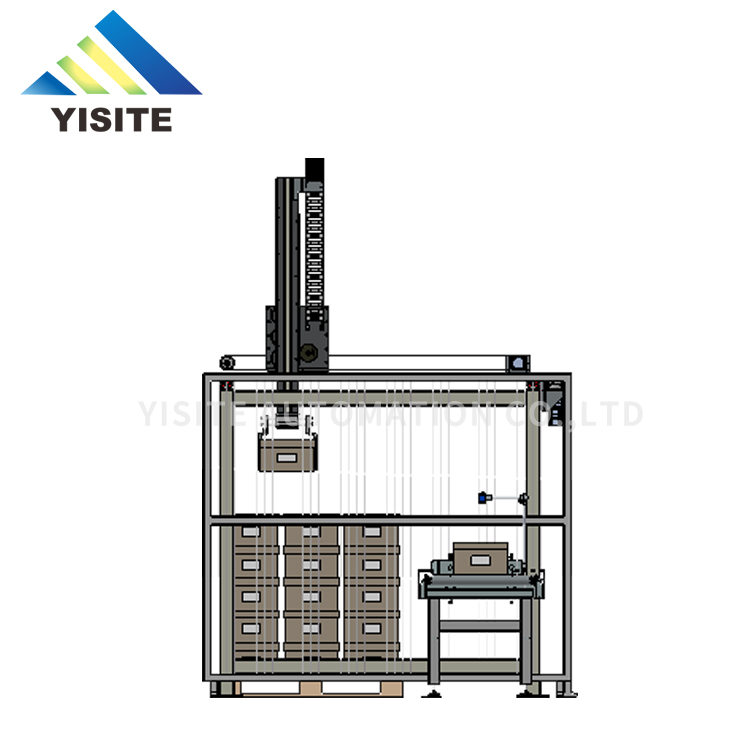
3. Stacker palletizer စက်တည်နေရာပြစနစ်
stacker တည်နေရာပြစနစ်သည် စက်ကိရိယာတစ်ခုလုံး၏အဓိကဖြစ်ပြီး၊ Yaskawa Company (Japan) မှ ထုတ်ကုန်ဖြစ်ပြီး၊ လျင်မြန်သောရွေ့လျားမှုအမြန်နှုန်းနှင့် ထပ်ခါတလဲလဲတိကျမှုမြင့်မားသည်၊ X၊ Y၊ Z သည် synchronous tooth belt transmission အတွက် ရွေးချယ်ထားသော တစ်ခုတည်းသောသြဒီနိတ်များ၊ ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှုသည် 0.1 မီလီမီတာ၊ အမြန်မျဉ်းရွေ့လျားမှုအမြန်နှုန်း- 1000 mm/s. X ဝင်ရိုးသည် တစ်ခုတည်းသော အရှည် 3000 မီလီမီတာ နှင့် 1935 မီလီမီတာ ရှိသော တစ်ခုတည်းသော တည်နေရာပြစနစ်တစ်ခု ဖြစ်သည်။ synchronous transmitter သည် positioning system နှစ်ခု၏ synchronous လှုပ်ရှားမှုကို သေချာစေပြီး 1500W servo motor ဖြင့် မောင်းနှင်ထားသည်။ မောင်းနှင်အား torque နှင့် inertia တို့ကို လိုက်ဖက်ရန်အတွက်၊ တိကျမှုမြင့်သော planetary gear reducer ရှိပါသည်။
Y-axis သည် dual positioning system ကိုအသုံးပြုထားသည်။ ထိုကဲ့သို့ ကြီးမားသော အပိုင်းပါရှိသည့် နေရာချထားခြင်း ယူနစ်သည် အဓိကအားဖြင့် Y-axis သည် အလယ်တန်းဆိုင်းထိန်းဖွဲ့စည်းပုံပါရှိသော နှစ်ချက်စွန်းထောက်ပံမှုဖြစ်သောကြောင့် ဖြစ်သည်။ ရွေးချယ်ထားသော အပိုင်းသည် မလုံလောက်ပါက၊ စက်ရုပ်လှုပ်ရှားမှု၏ တည်ငြိမ်မှုကို အာမခံမည်မဟုတ်ပါ၊ နှင့် စက်ရုပ်သည် အရှိန်ပြင်းပြင်းဖြင့် ရွေ့လျားသောအခါ တုန်လှုပ်သွားပါမည်။ အလယ်တွင် Z-ဝင်ရိုးကို ညှပ်ရန်နှင့် ဟန်ချက်ညီစေရန် တည်နေရာယူနစ်နှစ်ခုကို ဘေးချင်းကပ်လျက် အသုံးပြုထားသည်။ load ကောင်းကောင်း၊ ဤတပ်ဆင်မှုမုဒ်သည် အလွန်ကောင်းမွန်သော တည်ငြိမ်မှုရှိသည်။ တည်နေရာပြစနစ်နှစ်ခုကို 1500W ဆာဗာမော်တာဖြင့် မောင်းနှင်ထားပြီး၊ မောင်းနှင်အားနှင့် ရုန်းအားနှင့် နှိုင်းယှဥ်ပြိုင်မှုအတွက် တိကျသေချာသော ဂြိုဟ်တုဂီယာလျှော့ကိရိယာကို တပ်ဆင်ထားသည်။
Z-axis တည်နေရာပြစနစ်သည် ခိုင်မာပြီး တည်ငြိမ်ပါသည်။ ထုတ်ကုန်တွင် ယေဘုယျအားဖြင့် slider ကို ပုံသေထားပြီး အတက်အဆင်း ရွေ့လျားမှုရှိသည်။ အဆိုပါ servo motor သည် အရာဝတ္တုအား လျင်မြန်စွာ တိုးတက်ရန်လိုအပ်သည်၊ ၎င်းသည် ကြီးမားသောဆွဲငင်အားနှင့် အရှိန်အဟုန်ကို ကျော်လွှားရန် လိုအပ်ပြီး စွမ်းအင်ပိုလိုအပ်ပါသည်။ လက်တွေ့တွင်၊ ကျွန်ုပ်တို့သည် တိကျမှုမြင့်မားသောဂြိုဟ်ဂီယာအလျှော့ပေးသည့်ကိရိယာပါရှိသော 2000W ဆာဗာမော်တာအား ရွေးချယ်ခဲ့သည်။ အဆိုပါဝင်ရိုးသည် လည်ပတ်ဝင်ရိုးဖြစ်သည်။
4. Servo drive စနစ်
ဒစ်ဂျစ်တယ်လုပ်ဆောင်ချက်ပါရှိသော servo motor ကိုအသုံးပြုထားသော stacking manipulator စက်သည် မော်တာတစ်ခုစီတွင် servo motor နှင့် reducer တစ်ခု၊ servo motor လေးခုနှင့် ဒေါင်လိုက်မော်တာရှိသော lock servo motor အပါအဝင် reducer လေးခုကို တပ်ဆင်ထားပါသည်။
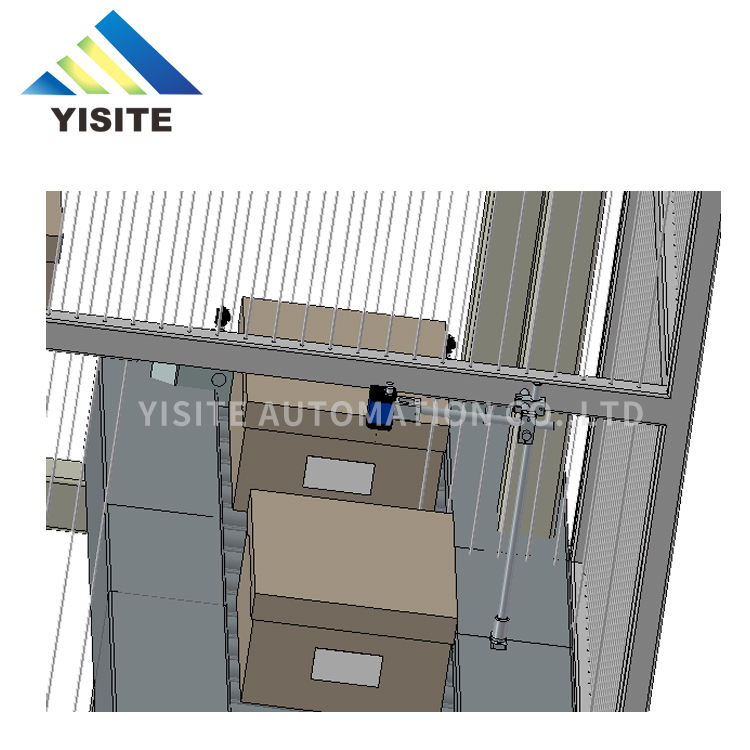
5. ပုံးချုပ်ကိုင်
pneumatic grip၊ ချိန်ညှိနိုင်သော ဖိအား၊ ဖိအားကြားခံအဆို့ရှင် တပ်ဆင်ထားသော အထူးဒီဇိုင်းဖြင့် stacking သည် induction ယန္တရားတပ်ဆင်ထားသော ဆုပ်ကိုင်လုပ်ဆောင်ချက်သည် အရာဝတ္တုကို အလိုအလျောက် ရိပ်မိနိုင်ပြီး အရာဝတ္ထုကို ဆုပ်ကိုင်ရန်အတွက် ထိန်းချုပ်ရေးစင်တာသို့ အကြောင်းကြားရန်။
6၊ ထိန်းချုပ်မှုစနစ်
ထိန်းချုပ်မှုစနစ်တွင် ကြီးမားသော PLC နှင့် ထိတွေ့မျက်နှာပြင်တစ်ခု ပါ၀င်ပါသည်။ ၎င်းစနစ်တွင် အစွမ်းထက်သော ပရိုဂရမ်းမင်းစွမ်းပကားများ ပါရှိသည်။ ကွဲပြားသောပုံစံများဖြင့် palletizing ပုံစံများဖြင့်၊ စနစ်သည် ရှေးဟောင်းပစ္စည်းပရိုဂရမ်အမျိုးမျိုးကို ကြိုတင်သတ်မှတ်နိုင်ပြီး သက်ဆိုင်ရာပရိုဂရမ်ကို အစားထိုးရန်အတွက် ထိတွေ့မျက်နှာပြင်ပေါ်တွင် လုပ်ဆောင်နိုင်ပါသည်။
7၊ ဘေးကင်းရေးကိရိယာ
စက်တွင် ချို့ယွင်းချက်အချက်ပြခြင်းနှင့် အချက်ပေးလုပ်ဆောင်ချက်ပါရှိပြီး အမှားအယွင်းတိုင်းသည် တိကျသောတည်နေရာကို တိကျစွာထင်ဟပ်နိုင်ပြီး အဓိကအားဖြင့် ချွတ်ယွင်းချက်များကို ဖယ်ရှားရန် လွယ်ကူလျင်မြန်စွာ လုပ်ဆောင်နိုင်သည်- စက်ရုပ်တိုက်မှုကာကွယ်ရေးလုပ်ဆောင်ချက်၊ တည်နေရာထောက်လှမ်းခြင်းအတွက် workpiece တပ်ဆင်ခြင်း; အလင်းမျက်နှာပြင်ဘေးကင်းရေးကာကွယ်မှု။
နည်းပညာဆိုင်ရာဘောင်များ
1. စက်မော်ဒယ်- YST-MD1500
2. Stacking စွမ်းရည်: 200-500 သေတ္တာ / H
3. ဖရိန် : SS41 (A3 သံမဏိဆေးထိုးပလပ်စတစ်ကုသမှု) ရှပ် S45C ဝက်ဝံသံမဏိ
4. ပါဝါ- AC၊ 3 အဆင့်၊ 380V၊ 9KW 50HZ
5. လေသုံးစွဲမှု- 500NL/MIN (လေအသုံးပြုမှု- 5-6kg/cm2)
6. စက်ပစ္စည်းအတိုင်းအတာ- (L) 3500mm (W) 2250mm (H) 2800mm (အမှန်တကယ် အပြင်အဆင် ဒီဇိုင်းပေါ်မူတည်၍)
7. ပစ္စည်းအလေးချိန်- 1,500 ကီလိုဂရမ်


အဓိကအားသာချက်ဖွဲ့စည်းမှု
1. Yaskawa အမှတ်တံဆိပ် ဆာဗာမော်တာ
2. ထိုင်ဝမ်အမှတ်တံဆိပ်အမြန်နှုန်းလျှော့ချစက်
3. Mitsubishi (Japan) PLC
4. Contactor နှင့် switches များကို Schneider တွင်အသုံးပြုရမည်။
5. Omron ဓာတ်ပုံလျှပ်စစ်အာရုံခံကိရိယာ
6. အင်တာဖေ့စ်ထိန်းချုပ်မှု လုပ်ဆောင်ချက်နှင့် နှိုးစက်အခြေအနေနှင့် နှိုးစက်လုပ်ဆောင်ချက်ကို ပြသခြင်း။
7. Yaskawa အမှတ်တံဆိပ် ကြိမ်နှုန်းပြောင်းစက်
8. ဖရိန်နှင့် ဘေးဘောင်များကို ကာဗွန်သံမဏိဖြင့် ပြုလုပ်ထားသည်။
9. ထိုင်ဝမ် AirTac Pneumatic ဒြပ်စင်များ
10. အီတလီ PIAB အမှတ်တံဆိပ် Sucker









